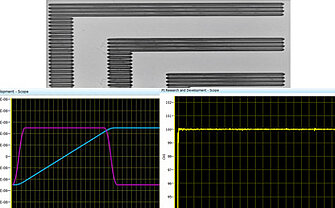
Alignment is crucial for effectiveness and performance in SiPh production. The industry has come a long way from manual processes to intelligent automation of photonics testing, assembly, and packaging. As the alignment of optics, fiber arrays, etc is the most time-consuming production step, new automated solutions improve yield, time-to-market, cost reduction, and scaling production volumes.
Learn more
Mastering Precision
The Evolution of Photonics Alignment Techniques from Manual to Algorithm-Assisted, Automated Systems
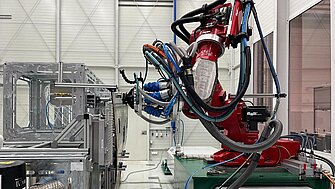
Advances in Aircraft Construction
Hexapod Enables Highly Dynamic 6-D Compensation Kinematic for Robots
Physik Instrumente developed a high-performance 6-DOF hexapod motion and positioning system for highly dynamic compensation kinematics in aircraft construction. The project's goal was to enhance the processing and sealing precision of CFRP-components in resin transfer molding manufacturing processes, while also reducing manufacturing times and process costs.
Learn more
Analyzing the Surface Conditions on Mars
The CheMin instrument of the Curiosity Mars Rover performs chemical and mineralogical analyses on Mars rocks. In order to analyze rock samples, the rock powder first has to be sorted. PICMA Stack multilayer piezo actuators from PI Ceramic qualified for this task. They carry out the oscillations required in material selection and supply at a defined frequency. Due to their all-ceramic insulation, they are ideal for long-term use in outer space conditions at a temperature close to the absolute zero and with extremely low ambient pressure.
Learn more
The Quantum Era Emerges - How PI Fast Automated Alignment Enables Practical Manufacturing
Nanopositioning stages and fast photonics alignment algorithms enable manufacturing of quantum technology devices
Learn more
ELT: A Spectacular Eye on the Sky
PICA Stack Actuators from PI for Precise and Reliable Image Stabilization in the World’s Largest Telescope
In the Chilean desert, the European Southern Observatory (ESO) is currently building the largest telescope in the world - the ELT. It consists of five mirrors, with the main mirror having a diameter of 39 meters. The smallest mirror, the M5, is designed to compensate for aberrations and guarantee high image quality, thanks in part to eleven PICA stack actuators from PI Ceramic.
Learn more
Point-of-Care Testing: The Pocket Laboratory
Piezoceramics Make Precise Liquid Handling in In Vitro Diagnostics Possible
In vitro diagnostics (IVD) is a requirement for recognizing diseases in blood, saliva, and urine samples. Some IVDs are used for analysis in laboratories, while point-of-care (PoC) tests are used close to the patient. However, all IVDs have one thing in common: Tiny liquid samples, in the milli- or picoliter range, are moved. For the handheld PoC devices, it is important for the components to be small and space-saving.
Learn more
Piezo versus Pandemic
Innovative Diagnostic and Therapeutic Procedures Based on Piezo Technology
What does piezo technology have to do with COVID-19? In the fight against the Corona virus, piezo components enable diagnosis and therapy procedures, from PCR tests to respirators.
Learn more
How Fast Nano-Focusing and Z-Scanning Mechanisms Advance Life Sciences, Biotech, Laser Processing, and Semiconductors
Linear Motors and Piezo Drives Solve Different Problems
Optical Delay Lines and Delay Line Stages – How Do They Work?
Turning Nanometers into Femtoseconds and Attoseconds
Why Constant Velocity and Synchronized Motion Performance across Multiple Axes Matters for Ultrafast Laser Machining, Imaging, and Metrology
High Performance motion control with fixed distance triggering in metrology, laser processing, and machine vision.
Learn more