








White Paper
My first ACS.NET Application
Step-By-Step Explanation on How to Create a Very Simple Application in Microsoft C#

High Performance Motion Control Systems
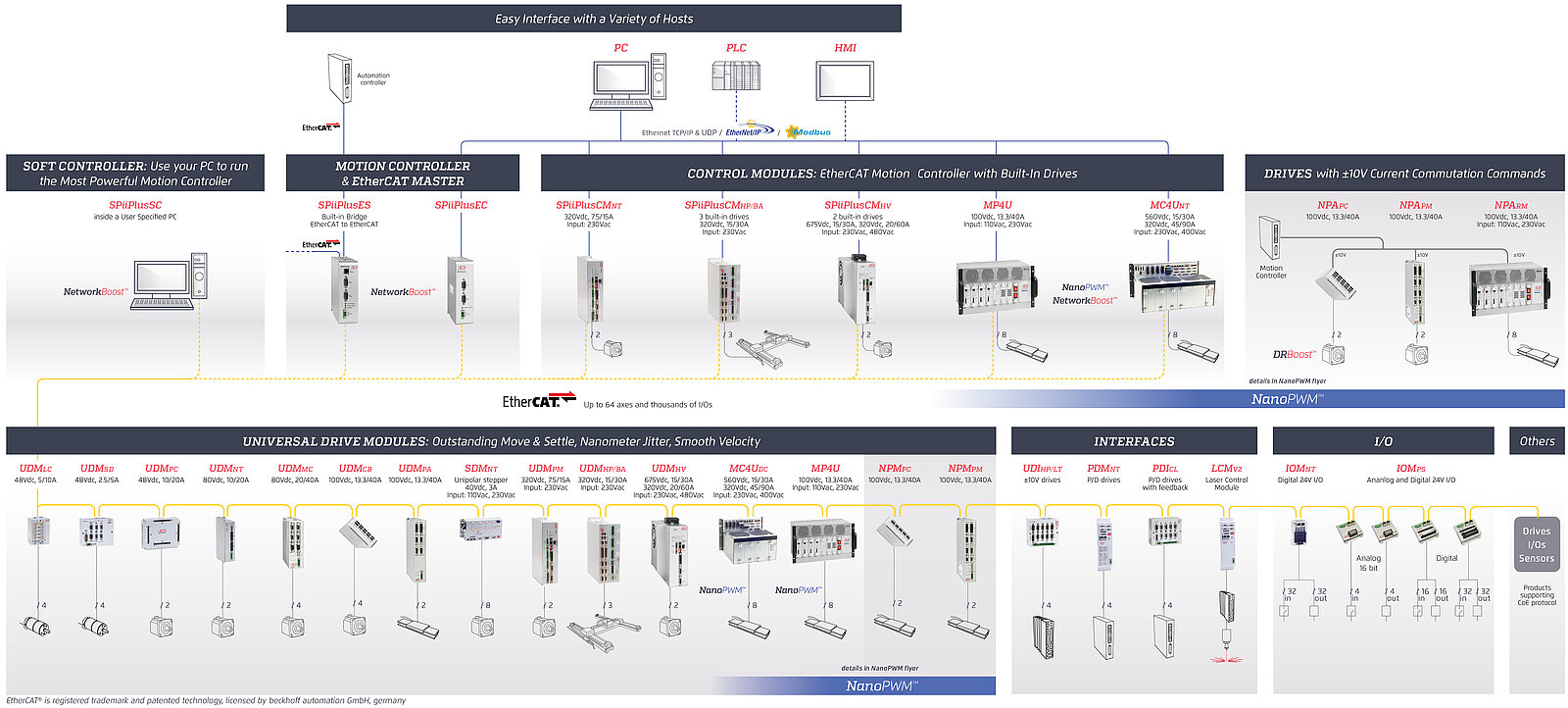
ACS Motion Control offers a complete modular system and organizes the components in three different layers:
The first level is the user interface. This is basically host software and allows for communication with the motion system.
The devices on the second level are called motion controllers. The motion controller is responsible for communication with the host software and also takes care of everything related to profile generation, trajectory, macros, diagnostics, and so on. The position commands are sent to the universal drive modules on the third level via an EtherCAT real-time network. In some products, the motion controller, the drives, and the power supplies are integrated into one housing. These products are called control modules.
The universal drive modules on the third level include the digital servo processor (DSP). It performs the servo positioning of the axes. The drive modules power and actuate the motors, handle the feedback devices, manage the I/Os, and analyze the sensor signals for closed-loop positioning control.
Characteristics of the ACS Platform of Industrial Controllers
The ACS motion controllers are also EtherCAT masters, responsible to managing all the nodes (drives, I/Os, sensors) that are connected to the EtherCAT network. They have a modular design, are scalable, and communicate with higher-level machines or the system control via Ethernet. All control loops, current, velocity, and position are executed at a frequency of 20 kHz which is a pre-requisite for achieving high dynamics with minimal errors.
The motion controllers optimize step-and-settle times by utilizing unique control algorithms, such as ServoBoost, as well as by profile shaping for example, which prevents the excitation of vibrations.
Proprietary and patented features such as NanoPWM enable to achieve dynamic range of current control of higher than 100,000:1 and as a result to achieve nanometer level of tracking errors while scanning a wafer and standstill jitter of sub-nanometer when doing metrology.
In addition, there is also extensive trigger functionality, e.g., for laser applications or inspection functions. The integrated 3-DOF compensation of positioning errors and yaw compensation for gantry solutions make it possible to realize applications with the highest demands on accuracy.
The proprietary Servo-Boost algorithm identifies disturbances in real time, identifies the root cause and minimizes its effect. It simplifies tuning and achieving optimization of the performance in the case of changing loads, interactions between different axes mounted on the same frame, and robustness overcoming many types of real disturbances. The result is highly stable and robust control with high positioning accuracy and extremely short settling times.