N-472.110
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; M10×1 thread; 22 N feed force; 2 mm/min maximum velocity; 2 m cable length




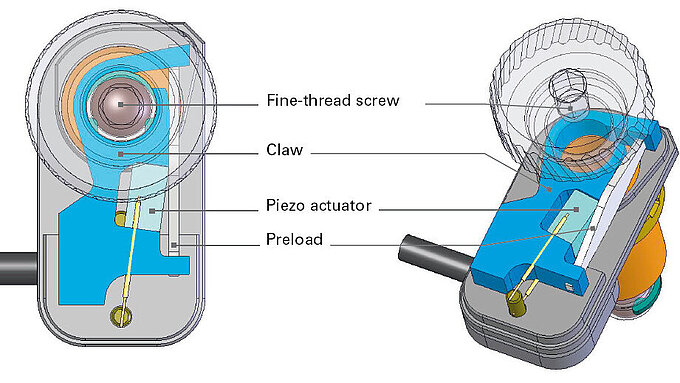
Compact, inexpensive inertia drive principle (stick-slip). At rest, the drive is self-locking, requires no current, and does not generate any heat. It holds the position with maximum force.
An incremental encoder measures the relative motion to a freely definable reference position.
Stable alignment of optical paths. Long-term positioning stability: High stability at target position, reliable startup even after longer downtimes. High holding force and resolution by combining piezo actuators with mechanical thread translation. Vacuum-compatible versions to 10-6 hPa available.
| Motion | N-472.110 | N-472.110Y | N-472.11V | N-472.120 | N-472.120Y | N-472.12V | Tolerance |
|---|---|---|---|---|---|---|---|
| Active axes | X | X | X | X | X | X | |
| Travel range in X | 7 mm | 7 mm | 7 mm | 7 mm | 7 mm | 7 mm | |
| Maximum velocity in X, unloaded | 2 mm/min | 2 mm/min | 2 mm/min | 2 mm/min | 2 mm/min | 2 mm/min | |
| Typical velocity in X, unloaded | 0.4 mm/min | 0.4 mm/min | 0.4 mm/min | 0.4 mm/min | 0.4 mm/min | 0.4 mm/min | |
| Linearity error in X | 0.3 % | 0.3 % | 0.3 % | 0.3 % | 0.3 % | 0.3 % | typ. |
| Positioning | N-472.110 | N-472.110Y | N-472.11V | N-472.120 | N-472.120Y | N-472.12V | Tolerance |
| Minimum incremental motion in X | 50 nm | 50 nm | 50 nm | 50 nm | 50 nm | 50 nm | typ. |
| Unidirectional repeatability in X | ± 200 nm | ± 200 nm | ± 200 nm | ± 200 nm | ± 200 nm | ± 200 nm | typ. |
| Integrated sensor | Incremental angle-measuring system | Incremental angle-measuring system | Incremental angle-measuring system | Incremental angle-measuring system | Incremental angle-measuring system | Incremental angle-measuring system | |
| Sensor signal | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | |
| Drive Properties | N-472.110 | N-472.110Y | N-472.11V | N-472.120 | N-472.120Y | N-472.12V | Tolerance |
| Drive type | Piezoelectric inertia drive | Piezoelectric inertia drive | Piezoelectric inertia drive | Piezoelectric inertia drive | Piezoelectric inertia drive | Piezoelectric inertia drive | |
| Operating voltage, peak-to-peak | 80 V | 80 V | 80 V | 80 V | 80 V | 80 V | |
| Maximum power consumption | 5 W | 5 W | 5 W | 5 W | 5 W | 5 W | |
| Drive force in positive direction of motion in X | 22 N | 22 N | 22 N | 22 N | 22 N | 22 N | max. |
| Maximum operating frequency during continuous operation | 400 Hz | 400 Hz | 200 Hz | 400 Hz | 400 Hz | 200 Hz | |
| Short-term maximum operating frequency | 2000 Hz | 2000 Hz | 2000 Hz | 2000 Hz | 2000 Hz | 2000 Hz | |
| Mechanical Properties | N-472.110 | N-472.110Y | N-472.11V | N-472.120 | N-472.120Y | N-472.12V | Tolerance |
| Holding force in X, passive | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | min. |
| Overall mass | 200 g | 200 g | 250 g | 200 g | 200 g | 250 g | |
| Material | Screw: Stainless steel. Housing: Aluminum, bronze. | Screw: Stainless steel. Housing: Aluminum, bronze. | Screw: Stainless steel. Housing: Stainless steel, bronze. | Screw: Stainless steel. Housing: Aluminum, bronze. | Screw: Stainless steel. Housing: Aluminum, bronze. | Screw: Stainless steel. Housing: Stainless steel, bronze. | |
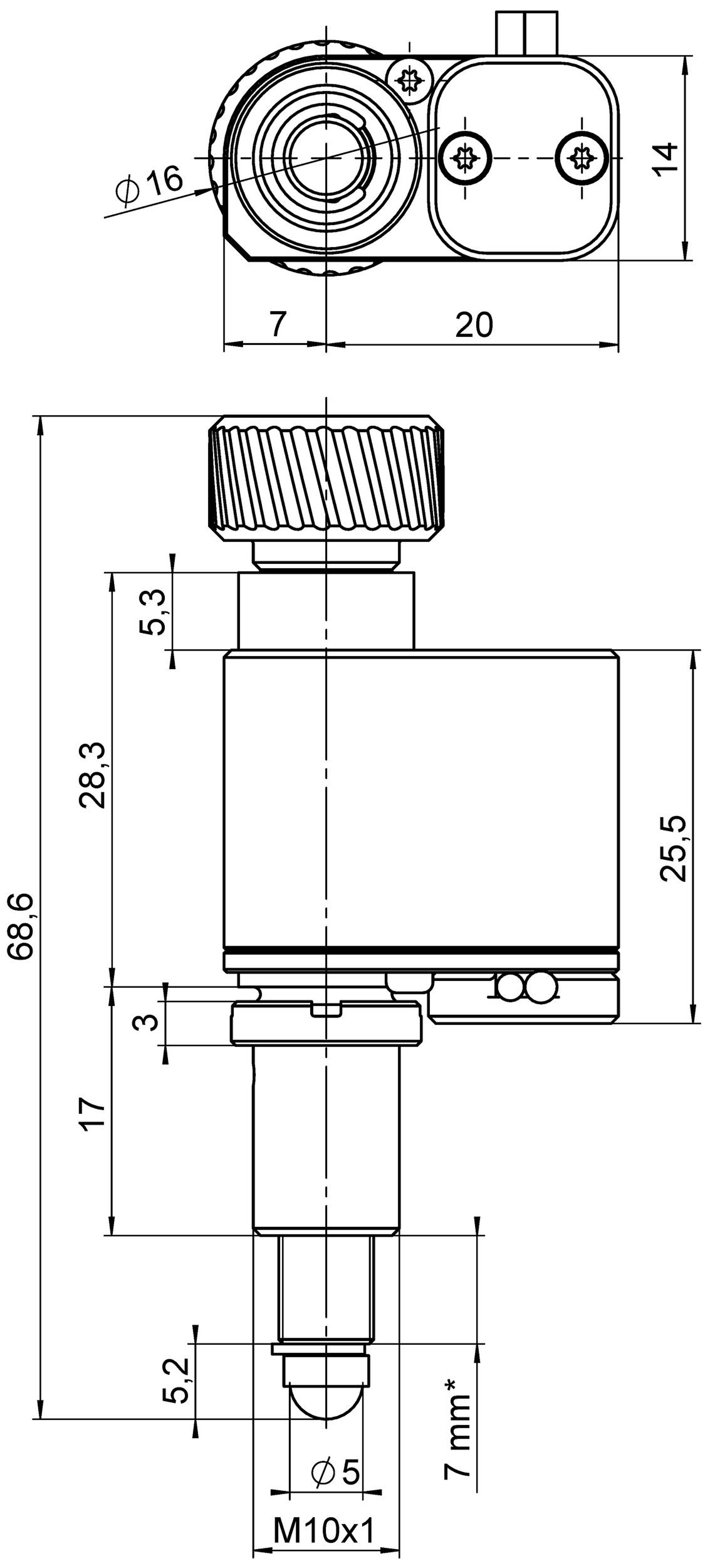
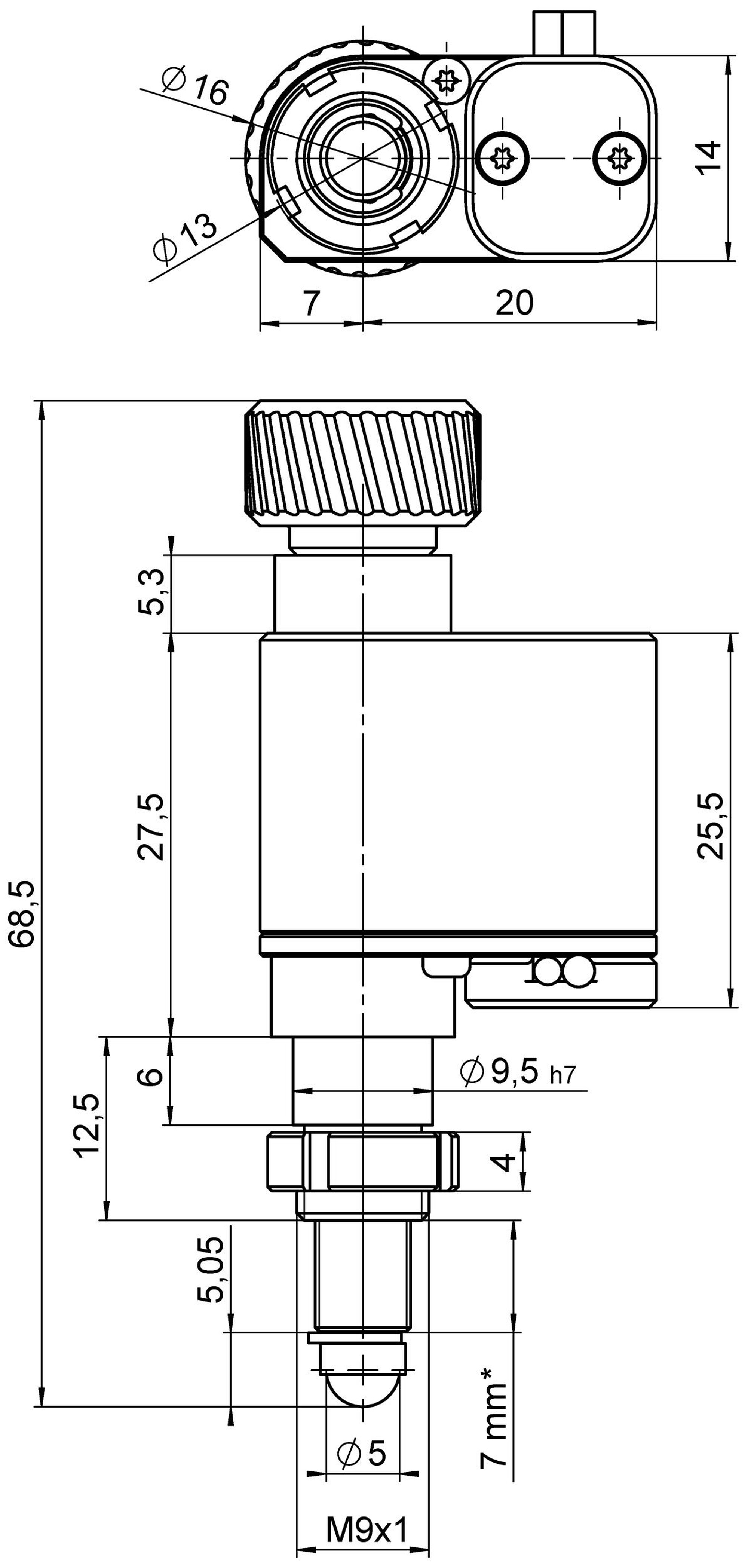
| Mechanical interface | M10×1 mounting thread | M10×1 mounting thread | M10×1 mounting thread | 9.5 mm clamping shank | 9.5 mm clamping shank | 9.5 mm clamping shank | |
| Miscellaneous | N-472.110 | N-472.110Y | N-472.11V | N-472.120 | N-472.120Y | N-472.12V | Tolerance |
| Operating temperature range | 10 to 40 °C | 10 to 40 °C | 10 to 40 °C | 10 to 40 °C | 10 to 40 °C | 10 to 40 °C | |
| Connector | D-sub 15-pin (m) | D-sub 15-pin (m) | D-sub 15-pin (m) | D-sub 15-pin (m) | D-sub 15-pin (m) | D-sub 15-pin (m) | |
| Cable length | 2 m | 2 m | 1 m | 2 m | 2 m | 1 m | |
| Recommended controllers / drivers | E-873.1AT | E-873.1AT | E-873.1AT | E-873.1AT | E-873.1AT | E-873.1AT | |
| Vacuum class | 10⁻⁶ hPa | 10⁻⁶ hPa |
Maximum velocity not suitable for continuous operation (refer to the user manual).
Linearity error: 20 N preload, measured over the entire stroke, compensated for temperature drift.
Unidirectional repeatability / minimum incremental motion: 20 N preload, measured at 100 µm stroke, compensated for temperature drift.
Cable length of vacuum-compatible models: 1 m connecting cable on the actuator, with stranded wires on the cable end; 2 m separate connecting cable, D-sub 15 (m) to stranded wires.
Ask about customized versions.
N-472 Closed-loop PiezoMike Linear Actuator
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; M10×1 thread; 22 N feed force; 2 mm/min maximum velocity; 2 m cable length
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; M10×1 thread; 22 N feed force; 2 mm/min maximum velocity; 2 m cable length; turned cable exit
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; M10×1 thread; 22 N feed force; 2 mm/min maximum velocity; vacuum compatible to 10-6 hPa; 1 m cable length
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; 9.5 mm (0.375") clamping shank; 22 N feed force; 2 mm/min maximum velocity; 2 m cable length
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; 9.5 mm (0.375") clamping shank; 22 N feed force; 2 mm/min maximum velocity; 2 m cable length; turned cable exit
Closed loop PiezoMike linear actuator; piezoelectric inertia drive; 7 mm travel range; 9.5 mm (0.375") clamping shank; 22 N feed force; 2 mm/min maximum velocity; vacuum compatible to 10-6 hPa; 1 m cable length